

Motor Controllers MC01
Gimbal & Tracker Motor Controller
Pequeño controlador de motor sin escobillas, en particular un ESC para el control de actuadores críticos, que puede ser controlado a través de interfaces PWM, CAN o I2C. Se utiliza para controlar motores para aplicaciones de precisión como cámara cardán o sistemas de seguimiento.
Motor Controller MC01
Gimbal & Tracker Motor Controller
Pequeño controlador de motor sin escobillas, en particular un ESC para el control de actuadores críticos, que puede ser controlado a través de interfaces PWM, CAN o I2C. Se utiliza para controlar motores para aplicaciones de precisión como cámara cardán o sistemas de seguimiento.
Pequeño y ligero
Rápido tiempo de reacción
Sin escobillas / Stepper
Compatibilidad con codificadores
Ganancia configurable
Aplicaciones del MC01
Control de posición y velocidad de seguimiento angular
Control de precisión del Gimbal
Desbloquea una precisión sin igual con nuestro ESC, ideal para Gimbal y sistemas de seguimiento. Experimente una estabilización rápida y un apuntamiento preciso. Los codificadores de precisión y la compatibilidad con CAN Bus lo hacen perfecto para aplicaciones de largo alcance y sistemas críticos.
Mejorar la puntería de largo alcance
Eleve la precisión de apuntamiento de largo alcance con nuestro ESC profesional. Los codificadores de precisión garantizan una precisión extraordinaria, un cambio de juego para el seguimiento de los sistemas de antena y otros dispositivos de seguimiento que requieren precisión de apuntamiento para aplicaciones de largo alcance.
Motor Control Versátil
Versatilidad avanzada en el control de motores. El MC01 ESC está diseñado para motores paso a paso sin escobillas en cardanes y sistemas de seguimiento, aporta un valor añadido en la precisión que tiene una interfaz de configuración donde las ganancias y los principales parámetros se pueden ajustar.

Compatibilidad con codificadores

Pequeño y ligero

Rápido tiempo de reacción

Sin escobillas / Stepper

Ganancia configurable
Aplicaciones del MC01
Control de posición y velocidad de seguimiento angular
Control de precisión del Gimbal
Desbloquea una precisión sin igual con nuestro ESC, ideal para Gimbal y sistemas de seguimiento. Experimente una estabilización rápida y un apuntamiento preciso. Los codificadores de precisión y la compatibilidad con CAN Bus lo hacen perfecto para aplicaciones de largo alcance y sistemas críticos.
Mejorar la puntería de largo alcance
Eleve la precisión de apuntamiento de largo alcance con nuestro ESC profesional. Los codificadores de precisión garantizan una precisión extraordinaria, un cambio de juego para el seguimiento de los sistemas de antena y otros dispositivos de seguimiento que requieren precisión de apuntamiento para aplicaciones de largo alcance.
Motor Control Versátil
Versatilidad avanzada en el control de motores. El MC01 ESC está diseñado para motores paso a paso sin escobillas en cardanes y sistemas de seguimiento, aporta un valor añadido en la precisión que tiene una interfaz de configuración donde las ganancias y los principales parámetros se pueden ajustar.
ESC Configurable
La configuración adaptable permite configurar el sistema para casi cualquier aplicación que requiera un apuntamiento preciso o el control de motores para aplicaciones críticas. Hay disponibles configuraciones de software para que el usuario pueda configurarlo fácilmente.

Control paso a paso o sin escobillas
La configuración MC01S está disponible para motores paso a paso y la MC01B para motores sin escobillas.

Múltiples Interfaces I/O
Entradas CAN Bus, PWM o I2C. Es posible utilizar varios controladores en el mismo bus CAN.

Configurable por el usuario
Herramientas de configuración disponibles para ajustar la ganancia y modificar los principales parámetros del MC01
ESC Configurable
La configuración adaptable permite configurar el sistema para casi cualquier aplicación que requiera un apuntamiento preciso o el control de motores para aplicaciones críticas. Hay disponibles configuraciones de software para que el usuario pueda configurarlo fácilmente.
Control paso a paso o sin escobillas
La configuración MC01S está disponible para motores paso a paso y la MC01B para motores sin escobilllas.
Múltiples interfaces I/O
Entradas CAN Bus, PWM o I2C. Es posible utilizar varios controladores en el mismo bus CAN.
Configurable por el usuario
Herramientas de configuración disponibles para ajustar la ganancia y modificar los principales parámetros del MC01.
Motor Control Avanzado
Rendimiento y flexibilidad excepcionales para aplicaciones de precisión.
Modos de Control
Se pueden seleccionar modos de control de velocidad bidireccionales o modos de posición relativa/absoluta para adaptar el controlador de motor a las necesidades de cualquier sistema.
Configuración de la telemetría
Telemetría mejorada para la supervisión y el funcionamiento avanzados del controlador del motor. Se incluyen sensores adicionales de voltaje de entrada y temperatura de la placa para la detección temprana de fallos en el sistema y evitar su propagación.
Soporte para codificadores
Se admiten varios tipos de codificadores para adaptar el rendimiento del control del motor a los requisitos del Gimbal / sistema de seguimiento. Se admiten los tipos de encoder SPI diferencial, SPI y digital (ECAP y EQUEP). Consulte con el servicio de asistencia para conocer la compatibilidad específica.

Motor Control Avanzado
Rendimiento y flexibilidad excepcionales para aplicaciones de precisión.
Modos de Control
Se pueden seleccionar modos de control de velocidad bidireccionales o modos de posición relativa/absoluta para adaptar el controlador de motor a las necesidades de cualquier sistema.
Configuración de la telemetría
Telemetría mejorada para la supervisión y el funcionamiento avanzados del controlador del motor. Se incluyen sensores adicionales de voltaje de entrada y temperatura de la placa para la detección temprana de fallos en el sistema y evitar su propagación.
Soporte para codificadores
Se admiten varios tipos de codificadores para adaptar el rendimiento del control del motor a los requisitos del Gimbal / sistema de seguimiento. Se admiten los tipos de encoder SPI diferencial, SPI y digital (ECAP y EQUEP). Consulte con el servicio de asistencia para conocer la compatibilidad específica.

Algoritmos de estabilización giroscópica
El variador MC01 incluye algoritmos de control avanzados para el control del cardán y del sistema de tracción. Incluye la lógica de estabilización giroscópica que, cuando se utiliza con sistemas de codificador de precisión proporcionan una precisión excepcional apuntando. Diseñado para gimbal personalizado y sistemas de antena de seguimiento u otras aplicaciones que requieren un control de alta precisión de motores sin escobillas / paso a paso.
Algoritmo de control PDI
El algoritmo de control integrado en el sistema es el Proporcional Integral Derivativo (PID), cuyas ganancias pueden ser configuradas por el usuario, por lo que el rendimiento se optimiza para cada aplicación. Este algoritmo de control PID gestiona la posición del motor, lo que puede hacerse tomando la posición del motor como un valor absoluto en el sistema de referencia o tomando la posición relativa a un sensor (es decir, IMU).
Algoritmos de estabilización
El variador MC01 incluye algoritmos de control avanzados para el control del cardán y del sistema de tracción. Incluye la lógica de estabilización de posición / ángulo que, cuando se utiliza con sistemas de codificador de precisión, proporciona una precisión excepcional apuntando. Diseñado para gimbal personalizado y sistemas de antena de seguimiento u otras aplicaciones que requieren un control de alta precisión de motores sin escobillas / paso a paso.
Algoritmo de control PDI
El algoritmo de control integrado en el sistema es el Proporcional Integral Derivativo (PID), cuyas ganancias pueden ser configuradas por el usuario, por lo que el rendimiento se optimiza para cada aplicación. Este algoritmo de control PID gestiona la posición del motor, lo que puede hacerse tomando la posición del motor como un valor absoluto en el sistema de referencia o tomando la posición relativa a un sensor (es decir, IMU).
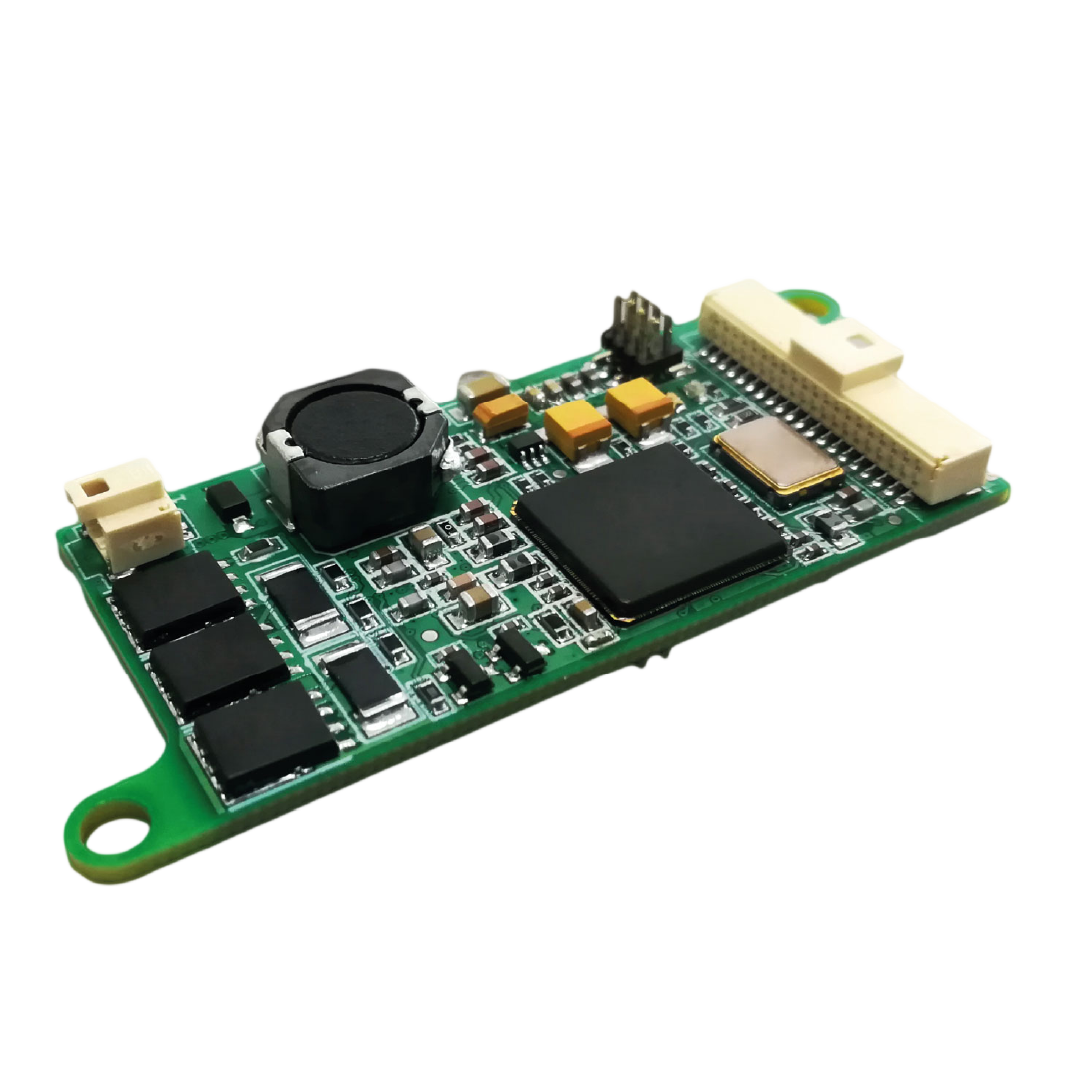
Modelo 3D
Interactúa con el modelo 3D y explora cada detalle del MC01.

Tamaño
60 x 25 x 15mm

Peso
10g

Temperatura
-40º a 60ºC

Aplicaciones
Gimbal / Tracker

Versión
1.0

Potencia
24VDC
Especificaciones
| Entrada de Alimentación | 5 VCC | 2.5 A |
| Alimentación del Motor | Voltaje: el mismo que el de entrada. Interfaz trifásica sin escobillas. |
| Corriente de entrada máxima | 3A |
| Corriente de entrada típica | 1.5A |
| Buses Comunicaciones | 1x CAN y 1x I2C |
| I/ O | 4x GPIO (on/off), 2x PWM / ECAP |
| Codificadores compatibles | SPI diferencial, SPI, digital (ECAP y EQEP) |
| Algoritmo de control | Proporcional Integral Derivada |
| Ganancias PID | Configurable |
| Salidas de alimentación auxiliares | 1x 5V DC. 1x 3.3V DC |
| Sensores integrados | Voltaje de entrada y temperatura de la placa |
| Dimensiones | 60x25x15 mm |
| Peso | 10g |
| Expansión CAN aislada redundante | 2x CAN para actuadores críticos – dos cables cada uno; no se necesitan cables de alimentación – (Opcional) |
Precio
| MC01B 1.0 | 350€ |
| MC01S 1.0 | 350€ |