

Autopilots DRx
Distributed Redundant Autopilot
Designed to meet eVTOL certification requirements (DO178C / ED-12, DO254 / ED 80, and DO160) this Distributed Redundant Autopilot is the only flight controller for fly-by-wire and autonomous control “Ready To Fly” any eVTOL aircraft for UAM.
Autopilot DRx
Distributed Redundant Autopilot
Designed to meet eVTOL certification requirements (DO178C / ED-12, DO254 / ED 80, and DO160) this Distributed Redundant Autopilot is the only flight controller for fly-by-wire and autonomous control “Ready To Fly” any eVTOL aircraft for UAM.

Redundant Arbiters

Configurable Voting

Distributed Redundancy

Robust to Zonal Failure

No Single Point of Failure
Distributed Redundant Autopilot
eVTOL & UAM Flight Controller
Distributed Redundancy
The distributed redundancy in Veronte Autopilot DRx permits the installation of multiple autopilots and management boards located in different areas of the aircraft. It makes it robust to zonal failures. In case of an autopilot or zonal failure other units will handover.
Ready to Fly
With more than 15 years experience in the control of autonomous vehicles, Veronte Autopilot is ready for its installation in all kinds of vehicles, including plane, multirotor, VTOL, etc. Control logics can be easily defined by the integrator adapting to any layout.
eVTOL Certification
Developed according to DO178C / ED12, DO254 / ED80 and DO160 and with distributed redundancy it meets the most demanding levels of certification for eVTOL and manned aircraft (DAL-A ongoing). Easily integrable without losing DO compliance.
Redundant Arbiters
Distributed Redundancy
Configurable Voting
Robust to Zonal Failure
No Single Point of Failure
Distributed Redundant Autopilot
eVTOL & UAM Flight Controller
Distributed Redundancy
The distributed redundancy in Veronte Autopilot DRx permits the installation of multiple autopilots and management boards located in different areas of the aircraft. It makes it robust to zonal failures. In case of an autopilot or zonal failure other units will handover.
Ready to Fly
With more than 15 years experience in the control of autonomous vehicles, Veronte Autopilot is ready for its installation in all kinds of vehicles, including plane, multirotor, VTOL, etc. Control logics can be easily defined by the integrator adapting to any layout.
eVTOL Certification
Developed according to DO178C / ED12, DO254 / ED80 and DO160 and with distributed redundancy it meets the most demanding levels of certification for eVTOL and manned aircraft (DAL-A ongoing). Easily integrable without losing DO compliance.
High Reliability for Certification
Thanks to the redundancy of both the independent autopilots and the Management Board, the Veronte Autopilot DRx has been designed without a single point of failure, making it robust to arbiter failures, zonal failures, bus failures, etc.

Redundant Communication
Autopilot DRX uses two redundant communication buses for the communications among the peripherals including galvanic isolation.

No Single Point of Failure
The flight control system for eVTOL is designed with no single point of failure, ensuring data integrity and being robust to zonal failures.

Real-Time Supervision
It incorporates multiple microcontrollers for real-time supervision. On an anomaly detection it will isolate the device avoiding failure propagation.
High Reliability for Certification
Thanks to the redundancy of both the independent autopilots and the Management Board, the Veronte Autopilot DRx has been designed without a single point of failure, making it robust to arbiter failures, zonal failures, bus failures, etc.
Redundant Communication
Autopilot DRX uses two redundant communication buses for the communications among the peripherals including galvanic isolation.
No Single Point of Failure
The flight control system for eVTOL is designed with no single point of failure, ensuring data integrity and being robust to zonal failures.
Real-Time Supervision
It incorporates multiple microcontrollers for real-time supervision. On an anomaly detection it will isolate the device avoiding failure propagation.
Designed for eVTOL
Maximum safety and FCS performance
All Kinds of eVTOL
It is tailored for eVTOL, meeting stringent requirements seamlessly. It offers exceptional flexibility, adapting easily to diverse eVTOL configurations, including multicopter, tailseater, plane, VTOL, tilting rotors or any other aircraft layout.
User Configurable
Model Based Design technology and custom C++ modules permit to easily adapt the flight controller to aircraft needs. Control phases, transitions, automatic routines, failsafes, etc. can be easily modified without losing the DO178C compliance.
Advanced Control Modes
User customizable. It offers configurability for fully customized control modes, allowing options like fully autonomous control or fly-by-wire modes. Limits can also be established based on user experience, geofencing or any other parameters.

Designed for eVTOL
Maximum safety and FCS performance.
All Kinds of eVTOL
It is tailored for eVTOL, meeting stringent requirements seamlessly. It offers exceptional flexibility, adapting easily to diverse eVTOL configurations, including multicopter, tailseater, plane, VTOL, tilting rotors or any other aircraft layout.
User Configurable
Model Based Design technology and custom C++ modules permit to easily adapt the flight controller to aircraft needs. Control phases, transitions, automatic routines, failsafes, etc. can be easily modified without losing the DO178C compliance.
Advanced Control Modes
User customizable. It offers configurability for fully customized control modes, allowing options like fully autonomous control or fly-by-wire modes. Limits can also be established based on user experience, geofencing or any other parameters.
UAM & UTM Integration
Geofencing / Sense & Avoid
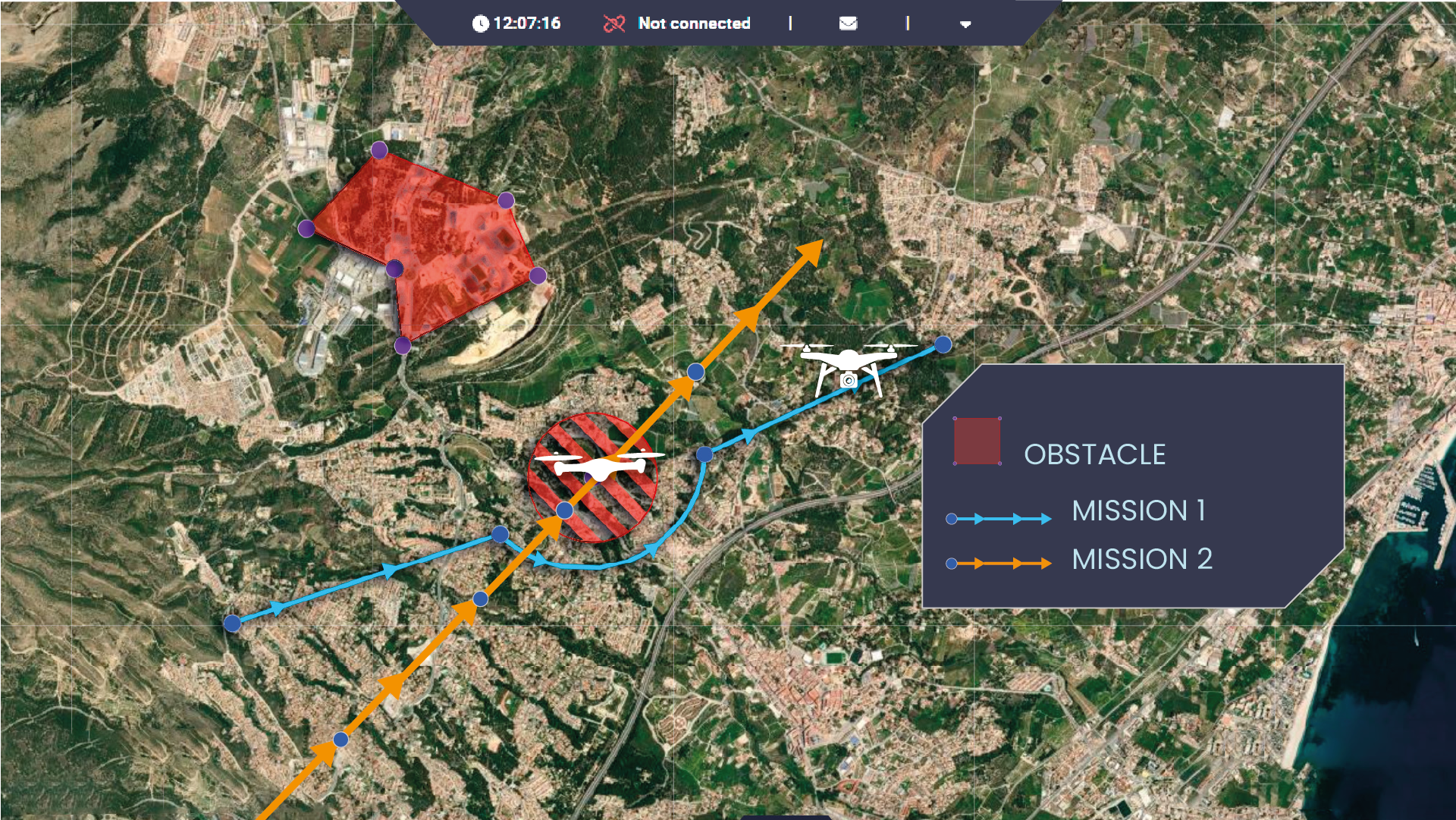
In compliance with the latest regulation for autonomous flying vehicles, the geofencing and geocaging permits to restrict the operation areas of the vehicles. This can be merged with ADS-B, Remote ID, vision or radar sense and avoid functions.

Cloud Integration for UTM
The aircraft can be easily communicated with the cloud by using the embedded eSIM card or through an external 4G/5G or Satcom module. It permits to remotely manage eVTOL fleets and to interface with UTM databases for controlled airspace integration
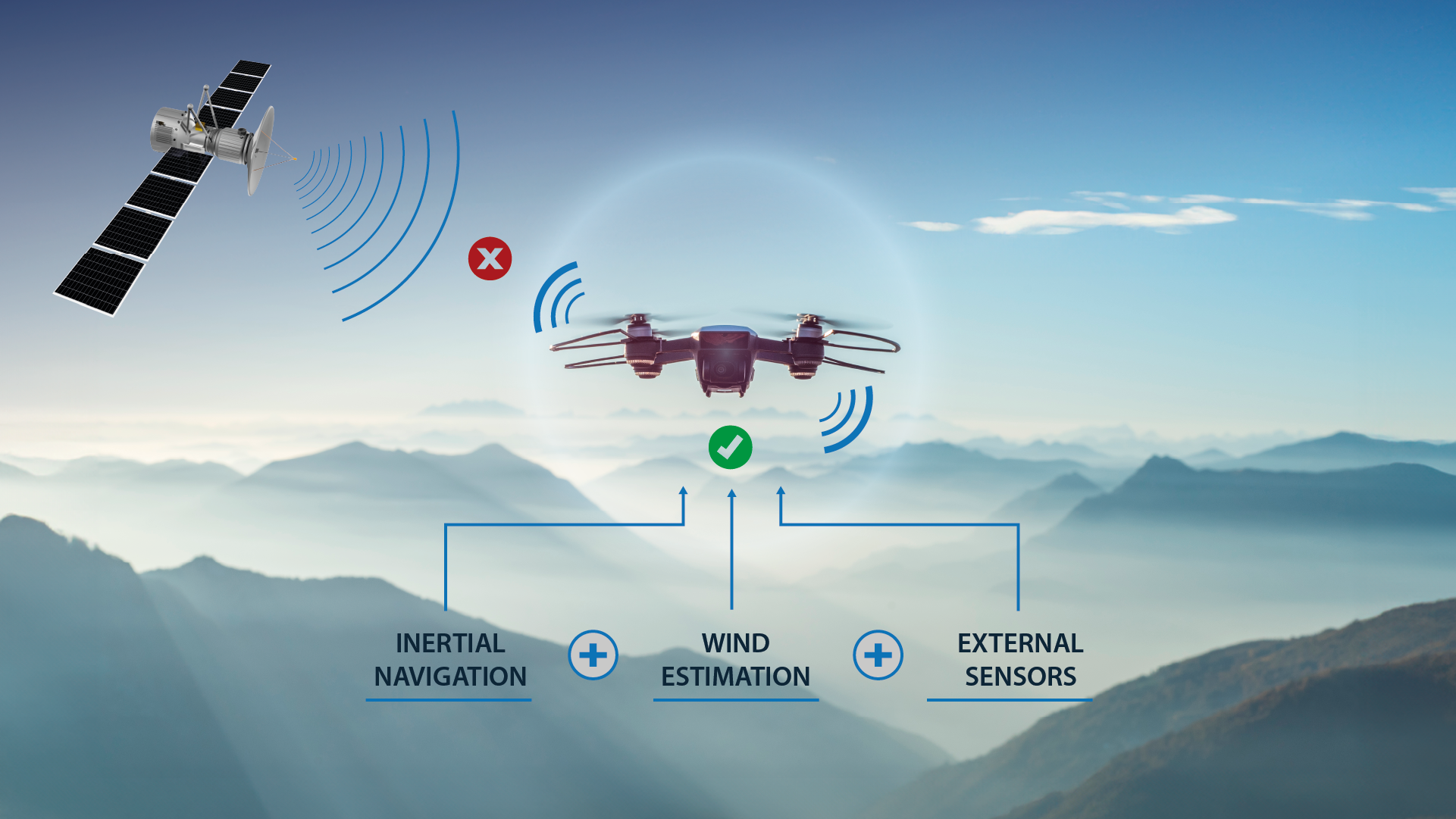
GNSS Denied Navigation
Advanced algorithms for inertial navigation merge sensor data with wind estimation in order to minimize drift in the event of a GNSS degradation. It can also be interfaced with external positioning sources for improving flight position accuracy on such events.

Disruptive eVTOL Control
Crafted for autonomous and fly-by-wire control of aircraft, with a particular focus on eVTOL applications. Setting it apart from conventional manned aviation tech, it prioritizes cost-effectiveness and is ready for eVTOL integration. Moreover, designed for mass production, it facilitates scalability and efficiency required for Urban Air Mobility to prosper, it enables eVTOL to populate our skies.
Veronte Autopilot Based
DRx includes all functionalities available in the Veronte Autopilot 1x plus the additional reliability given by having a distributed redundant architecture. It includes curve based navigation, embedded ADS-B or Remote ID, internal sensors, custom GNC algorithms, user configurable automatic routines, and a suite of advanced capabilities for autonomous aircraft control.
Disruptive eVTOL Control
Crafted for autonomous and fly-by-wire control of aircraft, with a particular focus on eVTOL applications. Setting it apart from conventional manned aviation tech, it prioritizes cost-effectiveness and is ready for eVTOL integration. Moreover, designed for mass production, it facilitates scalability and efficiency required for Urban Air Mobility to prosper, it enables eVTOL to populate our skies.
Veronte Autopilot Based
DRx includes all functionalities available in the Veronte Autopilot 1x plus the additional reliability given by having a distributed redundant architecture. It includes curve based navigation, embedded ADS-B or Remote ID, internal sensors, custom GNC algorithms, user configurable automatic routines, and a suite of advanced capabilities for autonomous aircraft control.
Specifications
| All Vehicles | Plane | Multi | Heli | Autogiro | VTOL | USV | + |
| eVTOL Control | Mission & payload | Assisted / manual / auto |
| Fly-by-wire | Onboard joystick & display |
| High Reliability | Full redundant | Fail operational |
| Sense & Avoid | Radar | Lidar | Camera | ADS-B | Remote ID |
| Internal Sensors | 6x IMU | 6x magneto | 6x barometer | 3x pitot |
| Positioning | 9x GNSS | RTK | GNSS Heading |
| Communications | 3x LOS & 4G | External LOS, LTE, Satcom |
| Programs | Model based design | User Programs |
| Phases | Takeoff | Landing | Cruise | Hover | Transition | + |
| Automations | Failsafe | Phase change | Operation | Payload |
| Navigation | Sensor mix | Kalman filter | External sensors |
| Pheripherals | Gimbal | ADS-B | Altimeter | Cameras | Others |
| Compatibility | Custom protocols | Mission computer | STANANG |
| Ports | PWM/GPIO | ADC |
| Buses | CAN | I2C | RS232 | RS485 | Ethernet | ARINC |
| Expandible | Veronte CEX | Up to 32 actuators |
| Redundancy | 3 Autopilot cores | Distributed redundancy |
| Fail-operational | Distributed management boards |
| Customizable | Configurable voting logics |
| Robustness | No single point of failure | Redundant bus |
| Certification | DO178-C | DO254 | DO160-G |
| Power Input | 6,5 – 36VDC | 5 – 15W | Redundant power input |
| Power | 3x 5-15W |
| Temperature Range | -40 to 60ºC |
| Weight (per core) | 198g |
Price
| DRx – ADS-B v4.10 | 30000€ |
| DRx – Remote ID v4.10 | 28000€ |